



Brushless DC (BLDC) motors have clear advantages over traditional brushed DC motors and are therefore being rapidly adopted in the market and in motion control applications. Less maintenance, faster operation, more compactness, less electrical noise, and better torque to weight ratio. Despite these benefits, BLDC motors are still more expensive than conventional DC motors because they require a motor drive controller (for electronic commutation) and a rotor position sensor.
Brushless DC (BLDC) motors have many advantages, but they have limitations. A major problem is cogging torque, which causes torque fluctuations and non-sinusoidal counter-electromotive forces, and is prone to torque pulsations that cause noise and vibration and severely limit system performance, especially in high-precision and high-stability applications. In high-speed applications, torque pulsations can be filtered out by the inertia of the load. At low speeds, torque pulsations are most pronounced, which can significantly limit performance. Torque pulsation is caused by brushless DC (BLDC) motor and PWM drive controller design, including geometric defects in the motor, commutation inaccuracies, and current drive fidelity. Waveforms, phase delays, friction, and hysteresis in the motor can be reduced by better motor design or by using better drive controllers to reduce these torque flickers.
Torque pulsation is divided into two main categories: cogging torque and commutation torque. Cogging torque is caused by changes in reluctance due to the opening of the stator slots as the rotor rotates. Slot torque can be reduced by changing the motor design. Stator stack skewing effectively reduces torque fluctuations using the same dimensions and specifications as brushless DC motors with closed slots, including stator stack skewing techniques. It is common practice to select a skew angle that is proportional to the stator slot pitch and to select the optimum skew angle for the largest possible cogging torque.
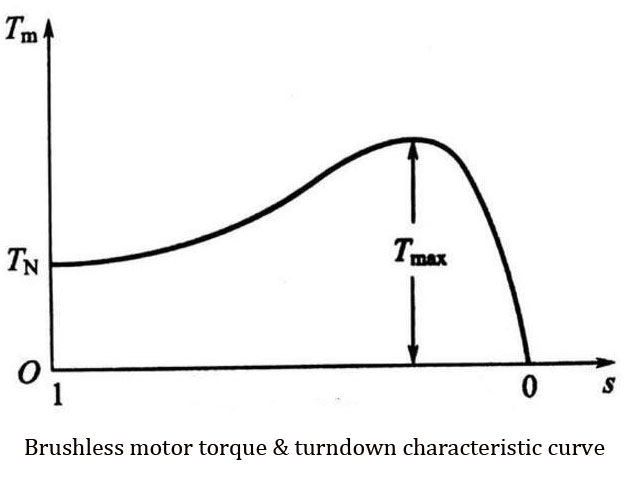
The torque pulsation of the motor is the ratio of the change between the rated torque to the maximum torque and the rate of rotation difference, as shown in the following figure.
Commutation torque pulsation is caused by the PWM inverter of the inverter and is due to current hysteresis or high-frequency current ripple generated by the inverter. During a phase change, when one phase is off and the other phase is on, the rise and fall rates of the individual phase currents are not equal. Therefore, the torque phase generated by the two currents during phase change adds a fully excited torque value, which will allow a smooth torque generation during the commutation interval.
To minimize commutation torque pulsation, improvements to the BLDC controllers are needed and several methods are used in the motor drive design to minimize commutation torque pulsation. One approach is to add an inductive-capacitive (L-C) filter to "reduce the high-frequency component of the inverter output to the motor. A key factor in reducing torque pulsation is to eliminate torque harmonics by adjusting the winding conduction phase so that it is properly compensated. There are four other ways to achieve torque pulsation reduction.
- Using direct torque control.
- Dynamically varying the input voltage.
- Adding torque estimation circuits, and using artificial neural networks and active disturbance suppression control.
BLDC motor controller designs not only overcome cost issues but also provide BLDC motor controller performance that cannot be achieved with conventional DC motors. Implementing no rotor position feedback sensors is one of the latest trends in BLDC motor controller design that can save money. Changes in the PWM switching strategy in motor drives are expected to eliminate the problems associated with torque pulsation. Another major trend in BLDC motor drive technology is the integration of BLDC motors and drive electronics into a single package to simplify systems, minimize interconnect cables, reduce noise and address motor drive compatibility issues.