



An electronic speed control (ESC) is an electronic circuit that controls and regulates the speed of an electric motor. It may also provide reversing of the motor and dynamic braking. The electronic speed controller is an essential part of an electric propulsion system's hardware. It acts like the brain of the system by telling the motor how fast to go based on data signals it receives from the throttle controller.
The mechanism within the ESC as well as its interaction with the battery and motor are quite fascinating. In this article, we will talk about how ESC works.
What is an electronic speed controller (ESC)?
The term ESC stands for "electronic speed controller" and is an electronic circuit used to change the speed of an electric motor, its route, and also to perform as a dynamic brake. These are frequently used on radio-controlled models which are electrically powered, with the change most frequently used for brushless motors providing an electronically produced 3-phase electric power low voltage source of energy for the motor. An ESC can be a separate unit that lumps into the throttle receiver control channel or united into the receiver itself, as is the situation in most toy-grade R/C vehicles. Some R/C producers that connect exclusive hobbyist electronics in their entry-level vehicles, containers, or aircraft use involved electronics that combine the two on a sole circuit board.
How does ESC work?
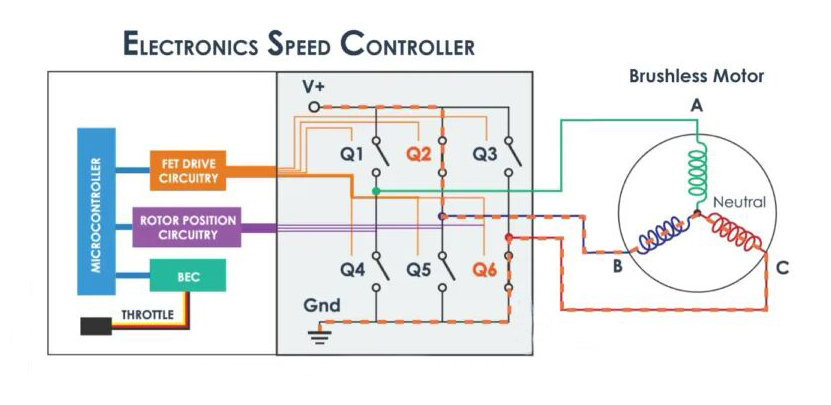
The role of the ESC is to act as a regulatory middleman between the battery and the electric motor. It controls the rotation of the motor by providing a timed electrical signal that is converted into a change in speed. It uses DC power from the battery and a switching system to achieve an AC three-phase current sent to the motor.
A vehicle's throttle controller is used to change the speed of an electric motor, whether it's an electric car, a plane, or a drone. Increasing the throttle increases output power, which changes the rate at which switches in the ESC circuit open and close.
There are several signaling protocols used to transmit throttle information from the remote control to the ESC. Each protocol has a slightly different performance, the most common being PWM, Oneshot, Multishot, and Dshot.
The most important difference between them is the frequency of the signal they transmit. Shorter frequencies allow for faster signals and faster drone reaction times. Also, the Dshot protocol is different from other protocols because it sends a digital signal instead of an analog signal. This makes the signal more reliable as it is less sensitive to electrical noise and more precise with higher resolution.
Hoe does ESC work in brushless DC motor?
As we have seen, the role of the ESC is to deliver electrical energy from the battery to the motor in a controlled manner. If you put 50% throttle on the controller, the ESC will give the motor 50% "power". What is "power" depends on the firmware used. Some will use the average voltage sent to the bldc motor, some will use the speed target, some will use a mix of both.
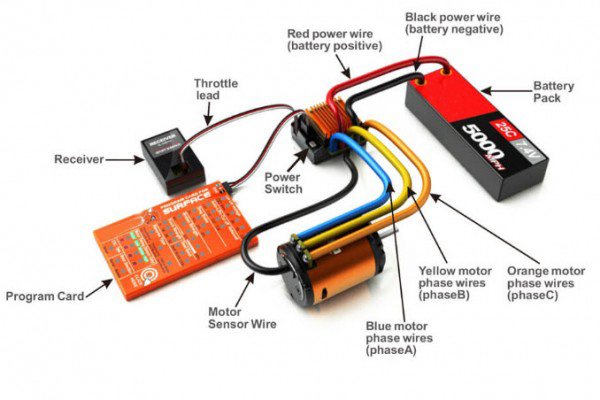
On one end, the ESC has two wires connected to the battery, a red (positive) wire and a black (negative) wire (Figure 9). On the other end are three wires that connect the ESC to the brushless motor. If the motor is connected to the ESC in the wrong direction of rotation, switching any two wires will make it rotate in the correct direction. The final extension is connected to a throttle receiver powered by the BEC.
There are two components inside a brushless motor: the rotor (containing the permanent magnets) and the stator (containing the copper coils). When current is passed to the coils of the stator, it becomes an electromagnet and forms a north and south pole. When the polarity of the electromagnet matches the polarity of the permanent magnet it is facing, their like poles repel each other and the rotor spins. Current is provided by the ESC in the form of a three-phase signal that constantly changes the polarity of the electromagnets, keeping the rotor spinning.
To initiate this process, the ESC needs to know the position of the rotor in order to be able to choose which electromagnets to activate. To determine its position in the sensor motor, the ESC uses Hall effect sensors. This information is used to precisely synchronize the phase output with the rotor angle to ensure smooth acceleration. In motors without sensors (more commonly used in drones), the start-up process is slightly less robust. The ESC will send a predetermined sequence to the motor to start it. As long as the motor has sufficient speed, the back electromagnetic force (back EMF) is sufficient for the ESC to obtain an accurate position estimate and synchronize the pulses.