



The brushless DC motor is developed on the basis of the brushed DC motor. It has step-less speed regulation, a wide speed regulation range, strong overload capacity, good linearity, long life, small size, lightweight and large output. Brushless motors are widely used in industrial equipment, instrumentation, household appliances, robots, medical equipment, etc. Since the brushless motor does not have brushes for automatic commutation, it needs to use an electronic commutator for commutation, which can be achieved by purchasing a matching brushless DC motor controller.
At present, there are three commonly used control methods for brushless DC motors: FOC (also known as vector frequency conversion, magnetic field vector oriented control), square wave control (also known as trapezoidal wave control, 120° control, 6-step commutation control) and sine wave control. So what are the advantages and disadvantages of each of these three control methods?
Square Wave Control
The square wave control uses the Hall sensor or the sensorless estimation algorithm to obtain the position of the motor rotor and then commutates 6 times (one commutation every 60°) within the electrical cycle of 360° according to the position of the rotor. Each commutation position motor outputs a force in a specific direction, so it can be said that the position accuracy of the square wave control is electrical 60°. Because the phase current waveform of the brushless motor is close to the square wave under control in this way, it is called the square wave control.
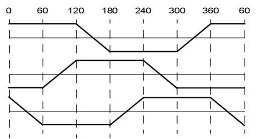
The square wave control method has a simple control algorithm and low hardware cost, and a higher motor speed can be obtained by using a controller with ordinary performance. The disadvantage is that the torque fluctuation is significant, there is a specific current noise, and the efficiency cannot reach the maximum value. Square wave control is suitable for occasions that do not require high motor rotation performance.
Sine Wave Control
The sine wave control uses the SVPWM wave, the output is a 3-phase sine wave voltage, and accordingly, the current is also a sine wave current. In this way, there is no concept of square wave controlled commutation, or an infinite number of commutations in one electrical cycle. Obviously, compared with square wave control, sine wave control has smaller torque fluctuation, less current harmonics, and more detailed control, but the performance requirements of the motor controller are slightly higher than that of square wave control, and the brushless dc motor efficiency cannot be maximized.
FOC Control
The sine wave control realizes the control of the voltage vector, and indirectly realizes the control of the current size, but cannot control the direction of the current. The FOC control method can be considered as an upgrade of the sine wave control, which realizes the vector control of the current and the motor stator magnetic field.
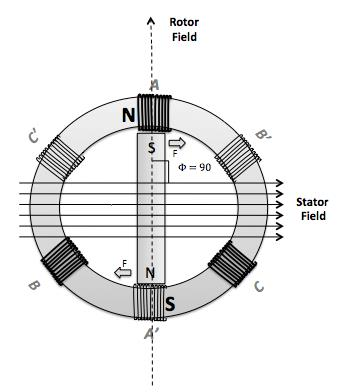
Since the direction of the motor stator magnetic field is controlled, the motor stator magnetic field and the rotor magnetic field can be kept at 90° at all times to achieve the maximum torque output under a certain current. The advantages of the FOC control method are small torque fluctuation, high efficiency, low noise and fast dynamic response. On the contrary, the disadvantage is that the hardware cost is high, the controller performance is required to be high, and the motor parameters need to be matched. Due to the obvious advantages of FOC, it has gradually replaced the traditional control method in many applications, and is very popular in the motion control industry.